2024. 12. 8. 12:59ㆍ박람회, 전시회
※ 2024 넥스트 모빌리티 엑스포12.5

12월5일부터 6일까지 인천 송도 컨벤시아에서 진행하는 넥스트 모빌리티 엑스포에 방문하였다. 12월 5일은 글로벌 모빌리티 컨버런스에 사전 예약 후 참석하였다.
1. 프라운 호퍼
이 기업은 독일에 본부를 둔 유럽 최대의 응용과학 연구기관으로, 산업과 사회에 실질적으로 적용 가능한 기술 연구를 목표로 하고 있다.
이 강의에서 들었던 내용은 친환경 에너지에 대한 중요성에 대해 배울 수 있었다. 현재 우리나라는 독일과 비슷하게 에너지 빈곤국이라는 표현을 했다. 이는 국내 에너지 자급률이 낮아 이렇게 언급한 것으로 판단된다. 그에 따라 지속가능한 에너지 즉, 친환경 에너지가 중요하다고 언급하였다.
위 사진에서 알 수 있듯이 프라운호퍼(Fraunhofer)는 미래 모빌리티 기술에서 협력 가능한 분야로 그린 수소(Green Hydrogen)와 연료전지 모빌리티(Fuel Cell Mobility)를 제안하고 있음을 보여준다.
프라운호퍼(Fraunhofer)는 지속 가능한 연료로서 그린 수소를 연구하고 개발하는 것을 목표로 한다. 또한 배출 없는 운송(emission-free transport)을 가능하게 하기 위해 수소의 생산과 저장 기술을 발전시키는 데 중점을 두었다. 마지막으로 연료전지의 성능을 높이고 내구성을 강화하기 위한 공동 프로젝트를 추진하고 있었다.

이번에는 차량 통신(V2X)과 지능형 교통 시스템(C-ITS)에 대해 배울 수 있었다. 차량 통신(Vehicular communication)"은 미래 협력형 지능형 교통 시스템(Cooperative Intelligent Transport Systems, C-ITS)의 핵심 기반으로 제시된다. C-ITS는 차량과 차량(V2V), 차량과 인프라(V2I), 네트워크 간의 통신을 통해 교통 안전, 효율성, 편안함을 개선하는 시스템이다.
- 세 가지 주요 목표:
- Safety(안전): 충돌 방지 및 사고 예방.
- Efficiency(효율성): 교통 혼잡 감소와 에너지 소비 최적화.
- Comfort(편안함): 운전자의 편의를 높이고 스트레스를 줄이는 기술.
이를 V2X 기술이 자율주행차와 스마트 교통 시스템 구현에 필수적이며, 사회적·경제적 이점을 제공할 수 있음을 강조하였다.
※ V2X(Vehicle-to-Everything) 추가 공부
V2X(Vehicle-to-Everything) 는 차량과 주변 환경 간의 통신을 가능하게 하는 기술로, 자율주행 및 지능형 교통 시스템의 핵심 요소로 여겨진다. 이 기술은 차량이 유·무선 통신망을 통해 다른 차량, 인프라, 보행자, 네트워크 등과 정보를 교환하거나 공유하는 것을 의미한다.
V2X의 주요 유형
V2X는 다양한 통신 유형을 포함하며, 다음과 같은 4가지 주요 카테고리로 나뉜다:
- V2V (Vehicle-to-Vehicle): 차량 간 통신으로, 속도, 위치, 방향 등의 데이터를 실시간으로 교환하여 충돌 방지 및 도로 안전성을 향상시킨다.
- V2I (Vehicle-to-Infrastructure): 차량과 도로 인프라(신호등, 도로 표지판 등) 간 통신으로, 교통 흐름 최적화 및 신호 연동을 통해 혼잡을 줄이고 효율성을 높인다.
- V2P (Vehicle-to-Pedestrian): 차량과 보행자 간 통신으로, 보행자의 위치와 움직임을 감지해 사고를 예방한다.
- V2N (Vehicle-to-Network): 차량과 클라우드 기반 네트워크 간 통신으로, 교통 정보나 날씨 등 외부 데이터를 실시간으로 제공받아 운전에 활용한다.

기술적 특징과 역할
- 센서 한계 극복: 기존 차량 센서(카메라, LiDAR 등)의 시야 제한이나 악천후 상황에서도 360도 인식을 가능하게 하여 자율주행차의 안전성을 높인다.
- 실시간 정보 교환: V2X는 양방향 통신을 통해 차량이 주변 환경의 정보를 실시간으로 수집하고 분석하여 잠재적인 위험을 예측하고 대응할 수 있다.
- 교통 효율성 향상: 신호등 조정, 교통 혼잡 해소 등을 통해 이동 시간을 단축하고 연료 소비를 줄이는 데 기여한다.
주요 활용 사례
- 도로 안전 개선: V2X 기술은 충돌 경고, 도로 폐쇄 알림 등으로 사고를 예방하며, 특히 자율주행차가 복잡한 도시 환경에서 안전하게 운행할 수 있도록 돕는다.
- 자율주행 지원: 완전 자율주행(Level 4 이상)을 구현하기 위한 필수 기술로, 차량 센서만으로는 감지할 수 없는 정보를 제공하여 더 높은 수준의 자율성을 가능하게 한다.
- 환경 보호: 교통 흐름 최적화와 연료 절감을 통해 이산화탄소 배출량을 줄이는 데 기여한다.
기술 표준과 발전
- V2X 기술은 크게 Wi-Fi 기반의 **DSRC(Dedicated Short-Range Communication)**와 셀룰러 기반의 **C-V2X(Cellular V2X)**로 나뉜다. DSRC는 저지연 특성이 강점이며, C-V2X는 LTE 및 5G 네트워크를 활용해 더 넓은 범위와 고속 이동성을 지원한다.
- 최근에는 5G 기반 C-V2X가 주목받으며 원격 운전, 군집 주행 등 고도화된 서비스 구현이 가능해지고 있다.

※ C-ITS(Cooperative-Intelligent Transport Systems) 추가 공부
C-ITS(Cooperative-Intelligent Transport Systems)는 기존의 지능형 교통 시스템(ITS)에 협력적 통신 기능을 추가한 차세대 교통 시스템으로, 차량, 인프라, 보행자 간 실시간 정보 교환을 통해 교통 안전성과 효율성을 극대화하는 것을 목표로 한다. 이 시스템은 교통사고 예방, 자율주행 지원, 교통 혼잡 완화 등 다양한 분야에서 중요한 역할을 한다.
C-ITS의 주요 특징
- 실시간 정보 제공: 차량이 주행 중 운전자에게 주변 교통 상황, 급정거, 낙하물 등의 사고 위험 정보를 실시간으로 전달한다.
- 양방향 통신: 차량 간(V2V), 차량과 인프라 간(V2I), 차량과 보행자 간(V2P) 데이터를 실시간으로 교환하여 돌발 상황에 신속히 대응할 수 있다.
- 자율주행 지원: 악천후나 센서의 사각지대 등 자율주행차량의 한계를 보완하며, 자율주행 시대를 대비한 핵심 기술로 자리 잡고 있다.
C-ITS와 기존 ITS의 차이점
| 구분 | 기존 ITS | C-ITS |
| 정보 전달 | 단방향(센터 중심) | 양방향(차량-인프라 간 실시간) |
| 초점 | 교통 관리 | 교통 안전 |
| 대응 방식 | 사후 관리 및 지연 발생 | 사전 예방 및 신속 대응 |
| 주요 기술 | CCTV, GPS | V2X 통신, IoT, AI |
핵심 기술
- V2X 통신 기술:
- V2X(Vehicle-to-Everything)는 차량과 모든 객체 간의 통신을 의미하며, V2V(차량 간), V2I(차량-인프라), V2P(차량-보행자) 등을 포함한다.
- 주요 통신 방식으로는 WAVE(Wireless Access in Vehicular Environments)와 C-V2X(Cellular-Vehicle to Everything)가 있으며, 특히 C-V2X는 LTE/5G 기반으로 넓은 서비스 범위와 빠른 데이터 전송 속도를 제공한다.
- 디지털 인프라:
- 도로변 기지국(RSU), 신호 제어기, 도로 기상정보 시스템 등 다양한 인프라가 필요하다.
- 차량 단말기(OBU)는 위치, 속도, 방향 등의 데이터를 수집해 RSU와 C-ITS 센터로 전송하며 실시간으로 정보를 주고받는다.
- 빅데이터 및 AI:
- 대규모 데이터를 처리하고 분석하여 최적의 교통 정보를 제공한다.
- AI를 활용해 돌발 상황 예측 및 대응 능력을 향상시킨다.
C-ITS의 주요 효과
- 교통사고 감소: 2030년까지 약 3,201명의 사망자와 54,596명의 중상자를 줄일 것으로 예상되며, 사회적 비용 절감 효과는 약 48조 원에 이를 것으로 추정된다.
- 교통 효율성 향상: 실시간 정보 공유로 교통 혼잡을 줄이고 이동 시간을 단축한다.
- 보행자 안전 강화: 보행자 충돌 방지 경고 등 다양한 안전 서비스를 제공한다.
활용 사례 및 전망
C-ITS는 현재 한국을 포함한 여러 국가에서 시범사업이 진행 중이며, 자율주행차 상용화를 위한 필수 기반 기술로 주목받고 있다. 특히 도로 위험 구간 경고, 스쿨존 속도 제어, 긴급 차량 접근 경고 등의 서비스가 개발되고 있으며, 향후 스마트 시티와 자율주행 시대를 위한 핵심 인프라로 자리 잡을 전망이다.
2. 아주대학교 소재현 교수님 : 스마트 시티 모빌리티 이슈
먼저 스마트 시티의 정의와 스마트 교통의 특징에 대해 설명해주셨다.

스마트시티의 정의
스마트시티는 정보통신기술(ICT)과 사물인터넷(IoT) 같은 첨단 기술을 활용하여 도시 운영의 효율성과 지속 가능성을 높이고, 시민들의 삶의 질을 개선하는 도시를 의미한다고 하였다.
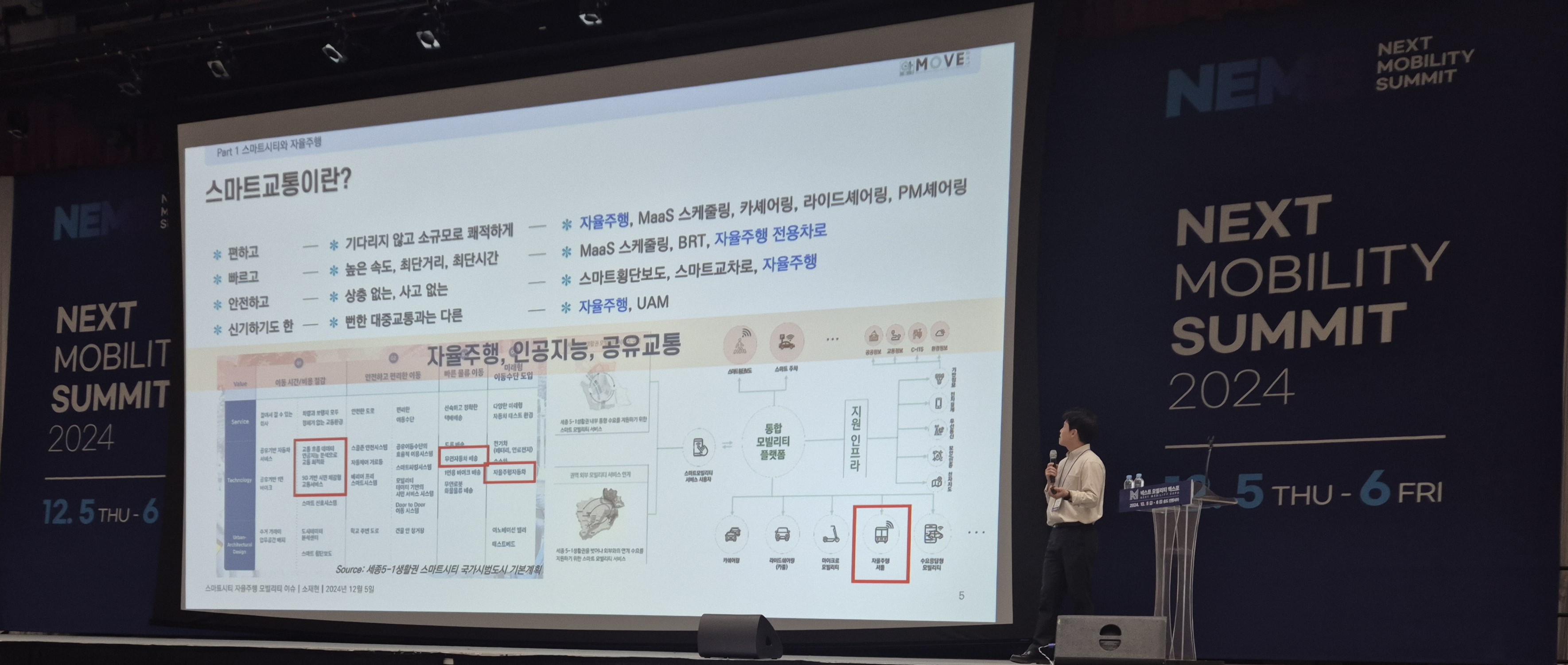
스마트 교통의 특징
- 편리함: 대기 시간 없이 소규모로 효율적인 이동 가능.
- 빠름: 높은 속도와 최단 거리, 최단 시간 이동 가능.
- 안전함: 상충(혼잡) 없는 교통 흐름과 사고 없는 시스템.
- 신기함: 기존 대중교통과는 차별화된 새로운 이동 방식.
주요 기술 및 서비스
- 자율주행: 자율주행 차량을 활용한 개인 및 대중교통.
- MaaS (Mobility as a Service): 통합 모빌리티 플랫폼으로 BRT(간선급행버스), 전용 차량 등을 포함.
- 스마트 인프라: 스마트 신호등, 자율주행 전용 도로 등.
- 신기술 기반 이동 수단: UAM(도심 항공 모빌리티), PM(개인형 이동 수단) 공유 서비스.
두번째로는 스마트 시티에서 자율 주행의 위상과 자율주행의 응용 사례와 R&D 서비스에 대해 설명해주셨다.

스마트시티에서 자율주행의 역할
- 자율주행 기술은 도시 교통 효율성, 환경 보호, 교통 혼잡 완화, 안전 증대 등 다양한 가치를 창출하며 스마트시티의 핵심 기술로 자리 잡고 있음.
- 다양한 지역에서 자율주행 기반 모빌리티 서비스 시범사업이 진행 중.
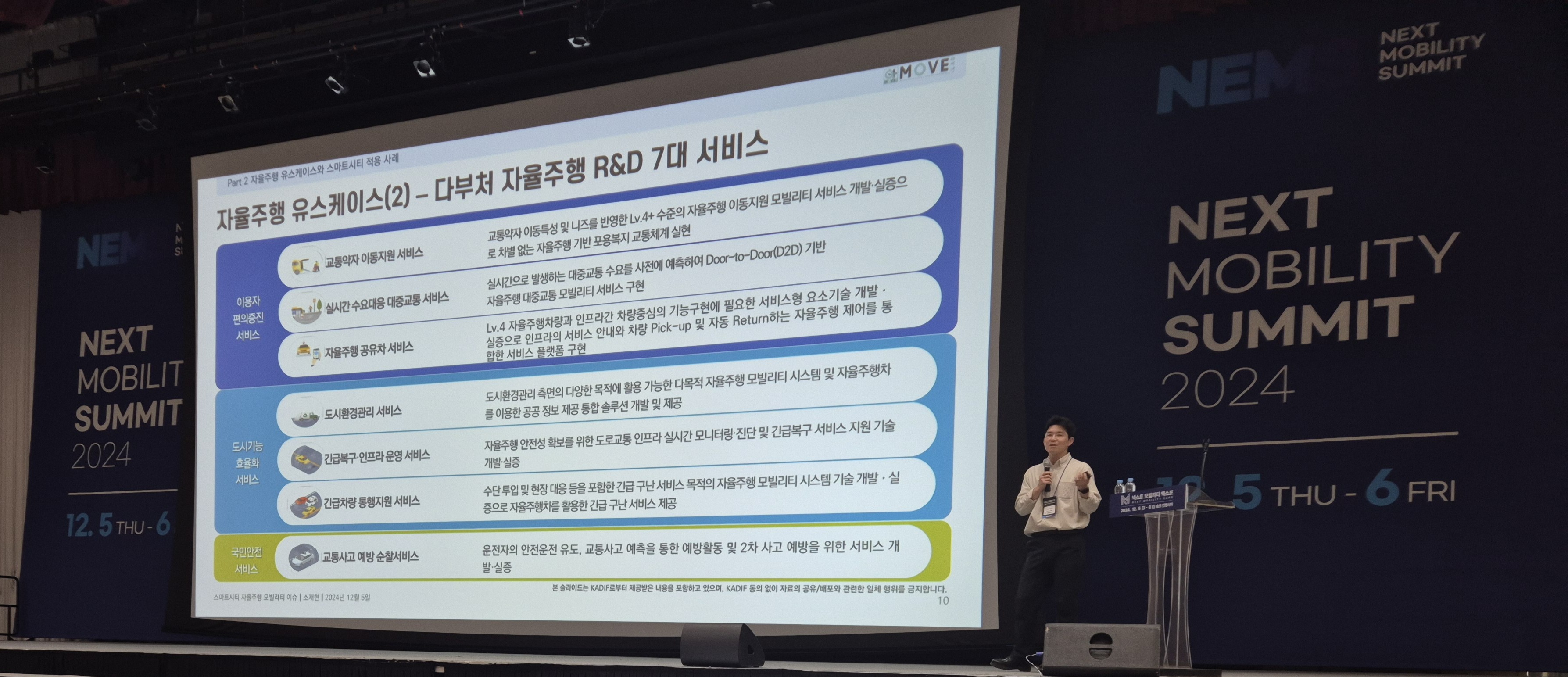
자율주행의 응용 사례와 R&D 서비스
- 7대 서비스 분류:
- 이용자 편의성 서비스:
- 교통약자 이동 지원.
- 실시간 수요 대응 대중교통.
- 자율주행 공유 서비스.
- 도시 기능 향상 서비스:
- 도시환경 관리.
- 긴급구호 및 마이크로 모빌리티 운영.
- 국민 안전 서비스:
- 교통사고 예방 순찰 및 긴급 대응.
- 이용자 편의성 서비스:
- 목표:
- Lv4+ 수준의 자율주행 이동 지원 및 모빌리티 서비스 개발.
- Door-to-Door(D2D) 기반의 맞춤형 교통 서비스 제공.
세번째로는 자율주행에 대한 사회적 인식에 대해 설명해주셨다.

자율주행차의 안전성과 사회적 수용성
- 소비자 조사 결과, 자율주행차를 사용하지 않는 주요 이유는 안전성 부족에 대한 우려(50%)와 차량 시스템 오류 가능성(45%)이었다.
- 자율주행차가 인간 운전자보다 얼마나 더 안전해야 하는지에 대한 기준 설정이 필요하며, 이를 위해 추가적인 검증과 규제가 강조되었다.
- 그래프에서는 인간 운전자와 자율주행차의 사고율을 비교하며, 기술 발전으로 안전성을 향상시킬 필요성이 제시되었다.

자율주행 이동수단으로서의 가능성과 한계
- 현재 자율주행 셔틀은 시속 25km 이하로 운행되며, 느린 속도로 인해 대중의 불편함이 지적되고 있다.
- 국내 사례로, 롯데 이노베이트 자율주행 셔틀이 시속 40km 운행 허가를 받은 점이 소개되었다.
- 자율주행차는 완전 자율(A형)과 부분 자율(B형)으로 분류되며, 각각의 기술적 특성과 활용 가능성이 분석되었다.
3. 인하대학교 김정은 센터장님 : Smart Cities on the Move
먼저 미래 모빌리티의 핵심 키워드에 대해 말씀해주셨다. 미래 모빌리티의 핵심 키워드는 혁신, 지속가능성, 연결성에 있다고 하셨다. 그 중 연결성은 현대 모빌리티의 심장이며, 이를 통해 무한한 가능성과 새로운 디지털 시대를 열어갈 것이라고 하셨다.
또한 자동차는 모빌리티의 핵심이며 단순한 이동수단에서 친구 같은 존재로 변해가고 있다고 하셨다.

Next Mobility의 핵심은 센서이며, 현재 우리가 보유한 가장 강력한 센서는 바로 스마트폰이라고 보셨다. 스마트폰은 다양한 센서를 내장하고 있을 뿐만 아니라, 이를 통해 데이터를 수집하고 처리하는 능력을 갖추고 있어 Next Mobility에서 중요한 역할을 한다고 한다. 특히, 스마트폰은 단순히 센서로 기능하는 것을 넘어, 허브(hub)로서의 역할도 수행한고 하셨다. 이는 스마트폰이 차량, 인프라, 사용자 간의 데이터를 연결하고 통합하며, 이를 기반으로 새로운 모빌리티 경험을 창출하는 중심 장치로 작동한다는 의미인 것으로 생각된다.

리빙랩의 주요 특징
- 사용자 참여형 혁신: 시민이 단순히 연구 대상이 아니라 혁신 활동의 주체로 참여한다. 문제를 정의하고 해결책을 설계하며 실행하는 과정에 적극적으로 관여한다.
- 실생활 기반 실험: 연구실이 아닌 시민의 일상생활 공간에서 실험과 검증이 이루어져, 현실적인 솔루션을 도출한다.
- 공동창조(Co-creation): 민간, 공공, 학계, 시민사회 등 다양한 이해관계자가 협력하여 문제를 해결한다. 이를 통해 새로운 지식과 기술이 창출되기도 한다.
- 지속 가능성: 단발성 프로젝트가 아닌 장기적인 데이터 축적과 네트워크 형성을 통해 지속 가능한 사회혁신 생태계를 구축한다.
리빙랩의 운영 방식
- 리빙랩은 설문조사나 의견수렴에 그치지 않고, 시민과 기업, 행정기관 등이 자발적으로 참여하여 데이터를 공유하고 실무적으로 협력한다. 이를 통해 도시 문제를 해결하거나 새로운 기술을 테스트하는 플랫폼으로 기능한다.
- ICT(정보통신기술)와 인공지능(AI) 같은 첨단 기술을 활용하여 데이터 기반의 문제 해결과 혁신을 도모하기도 한다.
4.SUM(Smar Your Mobility) : 자율주행 현재, 준비 미래를 위한 도전

자율주행 차량이 만들어지는 과정에 대해 설명해주셨다.
자율주행차는 다양한 기술과 시스템이 통합적으로 작동하여 만들어진다. 자율주행차의 개발 과정과 시스템 구성은 다음과 같은 주요 요소로 설명될 수 있다.
a. 자율주행차 개발 과정
- 기능 정의 및 설계: 자율주행차의 목표와 기능을 설정하고, 이를 구현하기 위한 설계를 진행한다.
- 기술 통합: 차량 제어, 센서 데이터 처리, 경로 계획, 의사결정 등 다양한 기술이 통합된다.
- 검증 및 테스트: 실제 도로 환경에서 다양한 상황을 시뮬레이션하고 테스트하여 안전성과 성능을 검증한다.
b. 자율주행 시스템 내부 구성
- 센서 시스템:
- 카메라, 라이다(LiDAR), 레이더, 초음파 센서 등이 포함되어 차량 주변 환경을 인식한다.
이러한 센서는 물체 탐지, 거리 계산, 속도 측정 등의 역할을 수행한다.
- 카메라, 라이다(LiDAR), 레이더, 초음파 센서 등이 포함되어 차량 주변 환경을 인식한다.
- 전자제어장치(ECU):
- 센서에서 수집된 데이터를 처리하고 차량의 동작을 제어하는 핵심 장치이다. 예를 들어, 주행 경로를 계산하거나 긴급 상황에서 브레이크를 작동시킨다.
- 센서에서 수집된 데이터를 처리하고 차량의 동작을 제어하는 핵심 장치이다. 예를 들어, 주행 경로를 계산하거나 긴급 상황에서 브레이크를 작동시킨다.
- 통신 시스템:
- 차량 간 통신(V2V) 및 차량-인프라 간 통신(V2I)을 통해 교통 정보와 실시간 데이터를 공유한다.
- AI 기반 소프트웨어:
- 딥러닝 알고리즘으로 도로 상황을 분석하고 최적의 주행 결정을 내린다. 예를 들어, 보행자 인식 및 차선 유지 기능 등이 포함된다.
- 딥러닝 알고리즘으로 도로 상황을 분석하고 최적의 주행 결정을 내린다. 예를 들어, 보행자 인식 및 차선 유지 기능 등이 포함된다.
c. 자율주행 기술의 단계적 구현
- 데이터 수집: 센서를 통해 도로 및 환경 데이터를 수집한다.
- 데이터 처리 및 분석: AI와 머신러닝 기술로 데이터를 분석하여 차량의 의사결정을 지원한다.
- 제어 명령 실행: 분석 결과에 따라 차량의 가속, 제동, 조향 등의 동작이 실행된다.
이러한 과정을 통해 자율주행차는 복잡한 도로 환경에서도 안전하고 효율적으로 주행할 수 있도록 설계됩니다.
이후 자율주행 기술의 핵심기술에 대해 소개해주셨다.

자율주행 기술의 주요 단계
1) 인지 (Perception)
- 딥러닝 기반 신경망과 LiDAR-비전 융합 기술로 차량 및 보행자를 탐지하고 추적.
2) 판단 및 경로 계획 (Decision & Motion Planning)
- 데이터 학습 기반으로 목표를 예측하고, 차선 유지/변경 등 주행 모드를 결정하며 최적 경로를 생성.
3) 측위 (Localization)
- AVM(어라운드 뷰 모니터링)과 전방 카메라를 활용한 지도 매칭 알고리즘으로 차량 위치를 정확히 파악.
4) 제어 (Motion Control)
- 환경 변화와 불확실성을 고려해 차량의 경로와 가속도를 제어하여 안정적인 주행을 보장.

자율주행 기술의 핵심 요소
SMOBI™ Autonomous Driving Platform
- 자율주행 시스템 통합:
- 차량 제어와 소프트웨어를 통합하여 자율주행 기능을 제공.
- 멀티센서 융합 환경 인식:
- LiDAR, 카메라, 레이더 등 다양한 센서를 결합해 주변 환경을 정확히 인식.
- 고정밀 위치추정 및 맵핑:
- 고정밀 지도(HD Map)와 비전 데이터를 활용한 SLAM 기술.
- 차량의 정확한 위치를 실시간으로 추적.
- 예측 및 모션 플래닝:
- 차량 및 보행자의 움직임을 예측하고 최적의 주행 경로를 계획.
- V2X(차량 간 통신) 데이터를 활용한 협력적 주행.
- 동역학 시스템 분석 및 제어:
- 차량의 동역학 모델을 기반으로 안정적인 주행 제어를 수행.
'박람회, 전시회' 카테고리의 다른 글
| 2024 Aiot 국제전시회 10.30 (0) | 2024.10.31 |
|---|---|
| KES 2024 (한국전자전) 10.23 (0) | 2024.10.24 |
| 2024 무인이동체산업엑스포 & 자율주행.모빌리티산업전 2024 07.19 (1) | 2024.07.20 |
| EV 트랜드 코리아 2024 - 2024.03.08 (0) | 2024.06.21 |
| 볼보 EX30 쇼케이스 2024.02.21 (1) | 2024.06.20 |